Let  be a stochastic process with mean
be a stochastic process with mean  , and variance
, and variance  . Let
. Let  be an observed time series of
be an observed time series of  .
.
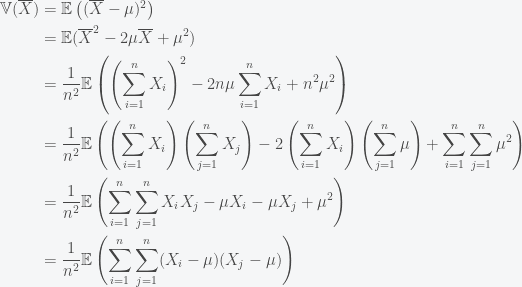
A good estimator for  is
is  . We know that if the observations are IID,
. We know that if the observations are IID,  . However, if the observations are not IID, the variance will be larger – this is what I learned recently in Loucks (2005). The authors skipped some details of the book, so I worked them out. Below is a detailed proof.
. However, if the observations are not IID, the variance will be larger – this is what I learned recently in Loucks (2005). The authors skipped some details of the book, so I worked them out. Below is a detailed proof.
Now, on one hand, the summands where  can be grouped; on the other hand, note that when
can be grouped; on the other hand, note that when  , there is one summand for
, there is one summand for  and one summand for
and one summand for  . Therefore,
. Therefore,
 (1)
(1)
Let  , in other words,
, in other words,  denotes the lag between the
denotes the lag between the  and
and  timesteps. (1) becomes
timesteps. (1) becomes
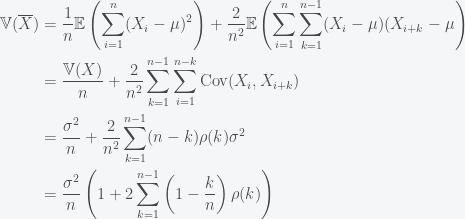
where  is the lag- autocorrelation and is defined as
is the lag- autocorrelation and is defined as

Observe that compared to the IID case, the variance of the sample mean estimator is inflated by a factor bigger than 1. Furthermore, it can be checked that this factor does not decrease as  increases. We conclude that the sample mean of an autocorrelated time series always has a bigger standard error than that of an IID time series with the same variance.
increases. We conclude that the sample mean of an autocorrelated time series always has a bigger standard error than that of an IID time series with the same variance.
References
Loucks, D.P et al. (2005). Water Resources Systems Planning and Management (Chapter 7, p. 198-201). UNESCO Publication. (The book is publicly available on the UNESCO website)
